AIロボットの導入で線路点検を省力化
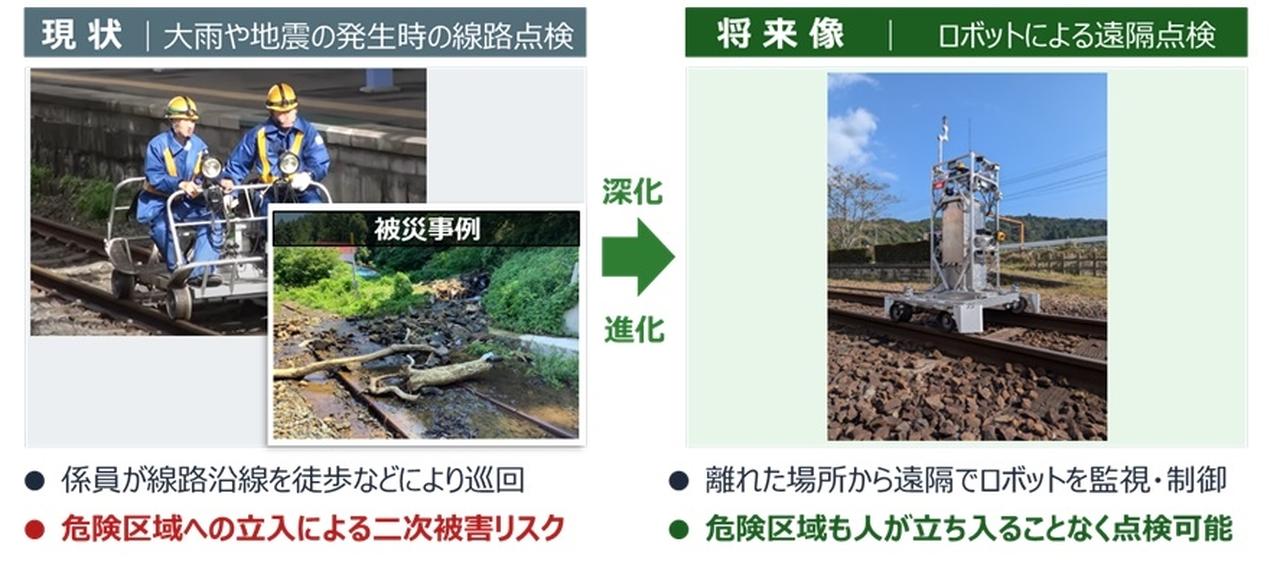
従来、鉄道の安全安定輸送を確保するためには、多くの労力をかけて維持管理業務を行ってきた。とくに自然災害が発生した際には、係員が線路沿線を徒歩で巡回し、路盤崩壊や土砂流入などの異常を目視で確認する作業が必要だったが、二次被害のリスクや熊などの野生動物による危険が伴っていたという。
こうした課題を解決するべく、JR東日本は「事務所内などの離れた場所からの点検手法」の確立を目指した取り組みを進めており、2024年からAIロボティクス企業プリファードロボティクス(Preferred Robotics)とともに、遠隔で作業できるロボット開発に着手している。

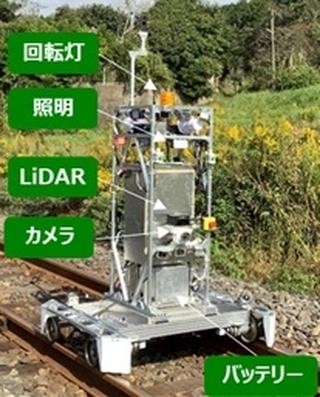
プロトタイプ機体の外観。
開発中のロボットは、搭載されたカメラや各種センサー、GNSSから得られる情報を用いて、鉄道線路上を自律走行する中で取得した映像や各種データを機体内に保存、リアルタイムで現場から離れた事務所内にいる係員へ送信される。また、AIが線路周辺の支障物の検知を補助し、列車の運行に支障をきたす異常の有無は、最終的に係員が判断する仕組みを採用している。
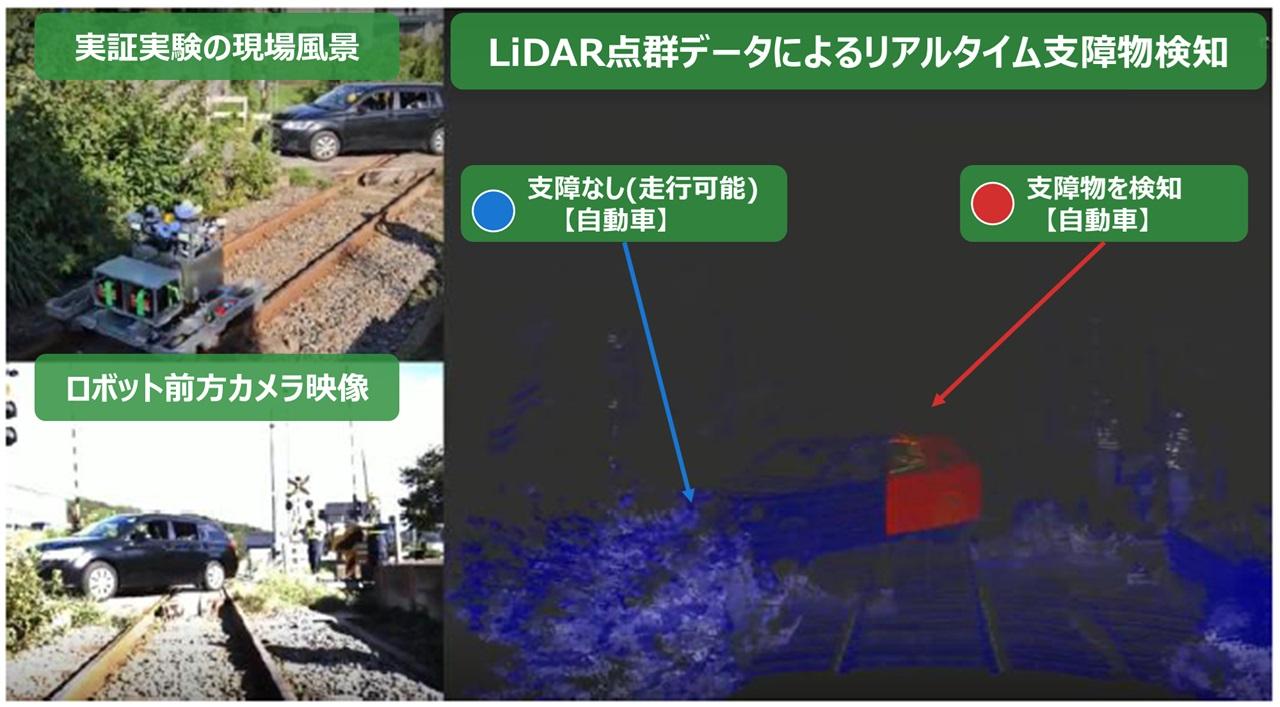
左上:障害物検知試験の状況
左下:ロボット搭載カメラの映像
右:ロボット搭載LiDARの取得データ。進路上にある物体を支障物(赤色表示)として認識
同ロボットは、2026年10月末までに機体を製作し、同年11月以降在来線を中心にさまざまな路線で走行試験が行われる予定だ。今後は大雨や地震などの災害発生時にロボットを活用することで、危険区域へ立ち入りや野生動物との遭遇の回避、体力を必要とする徒歩点検業務からの解放、働き方改革などさまざまなメリットが期待されている。
徒歩巡回とロボット導入後の比較
■点検方法
従来:係員が線路沿線を徒歩などで巡回し、目視で列車の運行に支障を及ぼす異常の有無を確認
ロボット導入後:線路上を自律走行し、取得したデータを係員がリアルタイムで確認して、列車の運行に支障を及ぼす異常の有無を確認
■取得データ
従来:係員の目視結果を記録(紙・端末への手入力)
ロボット導入後:カメラ・センサーにより映像・データを一括で取得
■異常検知
従来:係員の経験・知見に基づく判断
ロボット導入後:補助的にAIが自動解析し、線路内の支障物を検知し、最終判断を係員が実施
■安全面
従来:獣害リスク・災害時の危険区域立入りなど、点検者への身体的なリスクがある
ロボット導入後:係員は離れた場所にいながら点検ができ、人が危険区域に入る必要を減らせる
■データ蓄積
従来:点検結果の記録が中心
ロボット導入後:走行毎にデータを蓄積し、設備管理に活用
将来的には、取得した映像や3D点群データを設備管理に活用し、ドローンの発着機能を付加することで線路周辺の詳細な状況把握を可能にするなど、ロボティクスとAI技術を駆使して鉄道インフラ維持管理業務の高度化を目指していく方針だ。